Робот паук гексапод на Ардуино, металл, черный
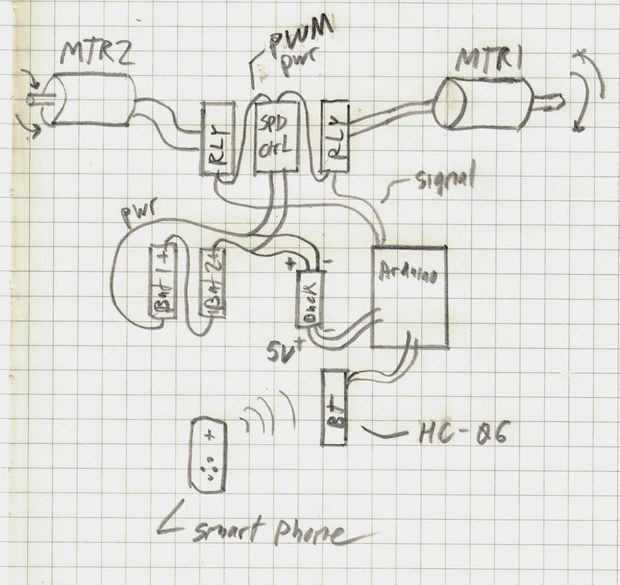
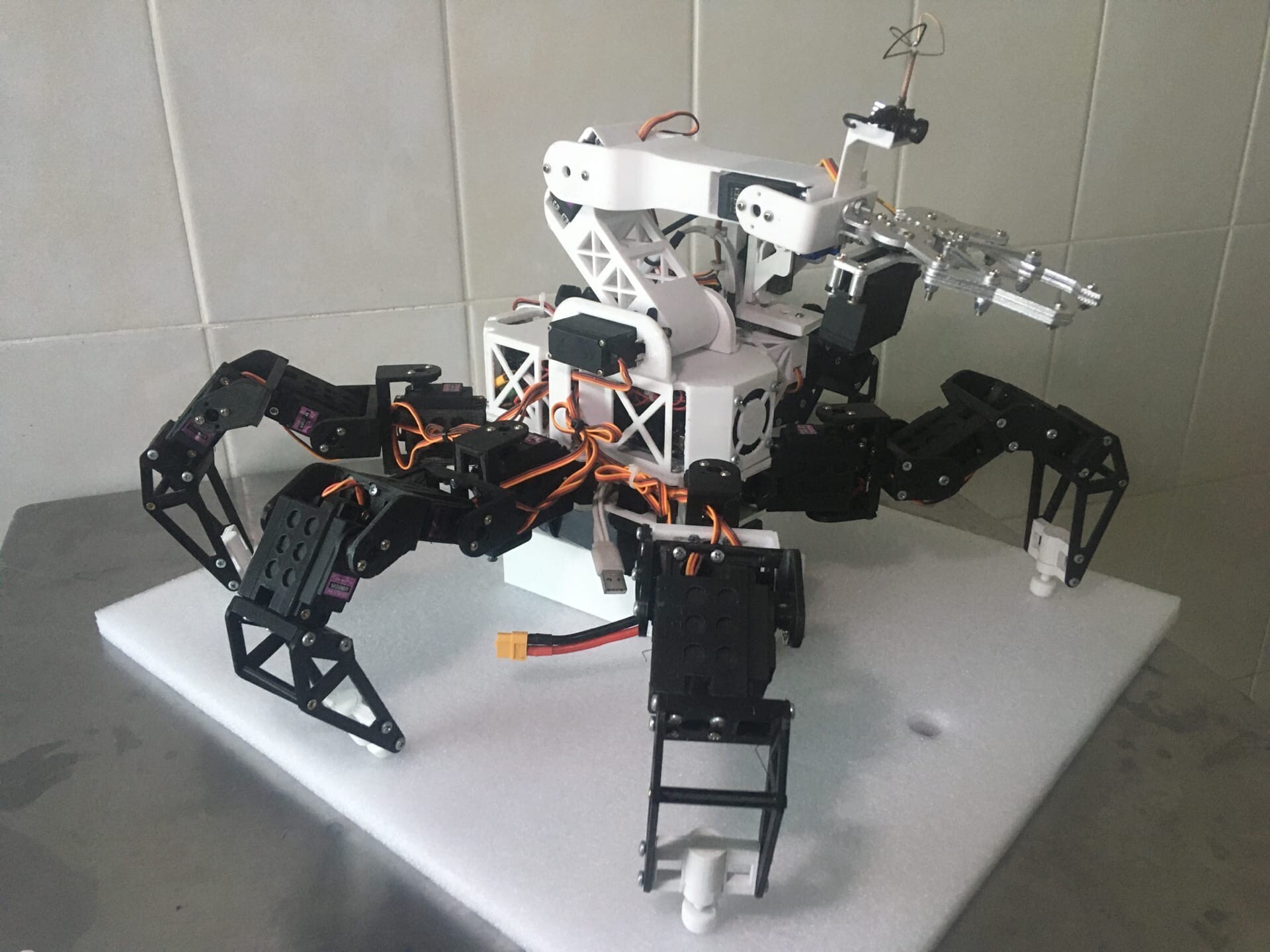
Julian Horsey собрал этого симпатичного робота-паука на базе Arduino контроллер Arduino Mega. В конструкции задействовано всего два электродвигателя, которые управляются релейными модулями H-bridge, что позволяет паучку двигаться вперед, назад или медленно поворачиваться за счет изменения направления вращения электромоторов. Управление - со смартфона через Bluetooth. Паук движется сходно с танком или роботом, маневрами которого можно управлять за счет разной скорости вращения двух его колес. Оцените видеоролик, демонстрирующий новинку и поясняющей ее конструкцию.
")










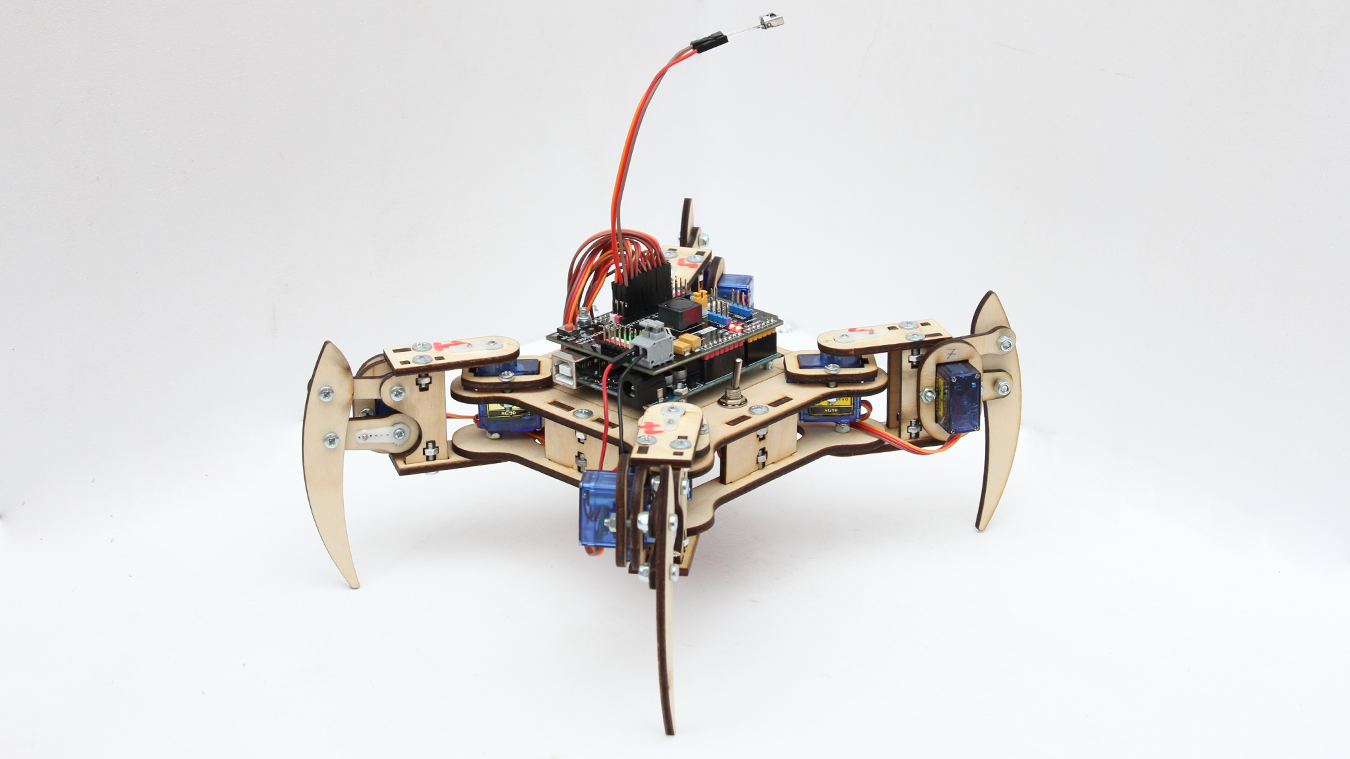
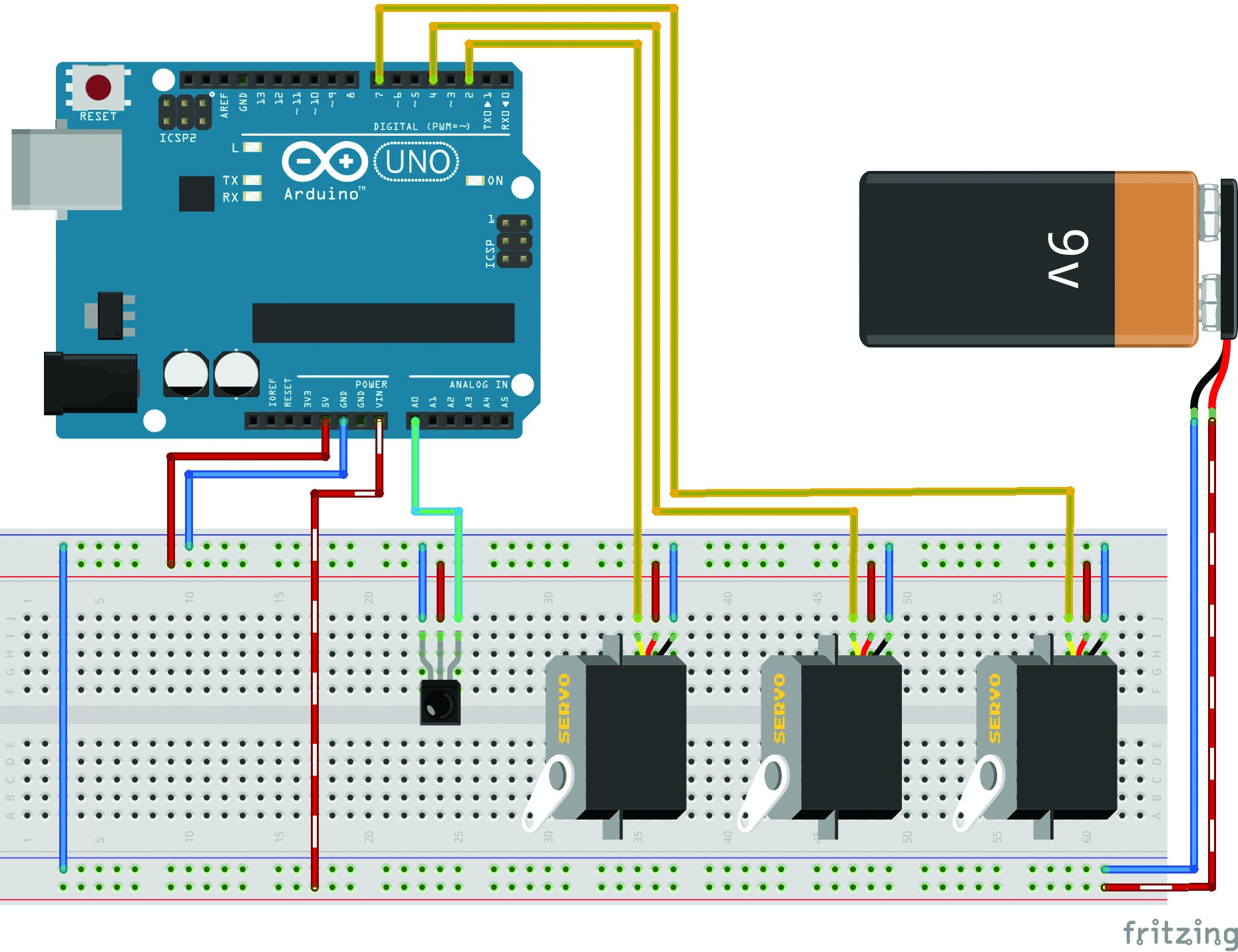
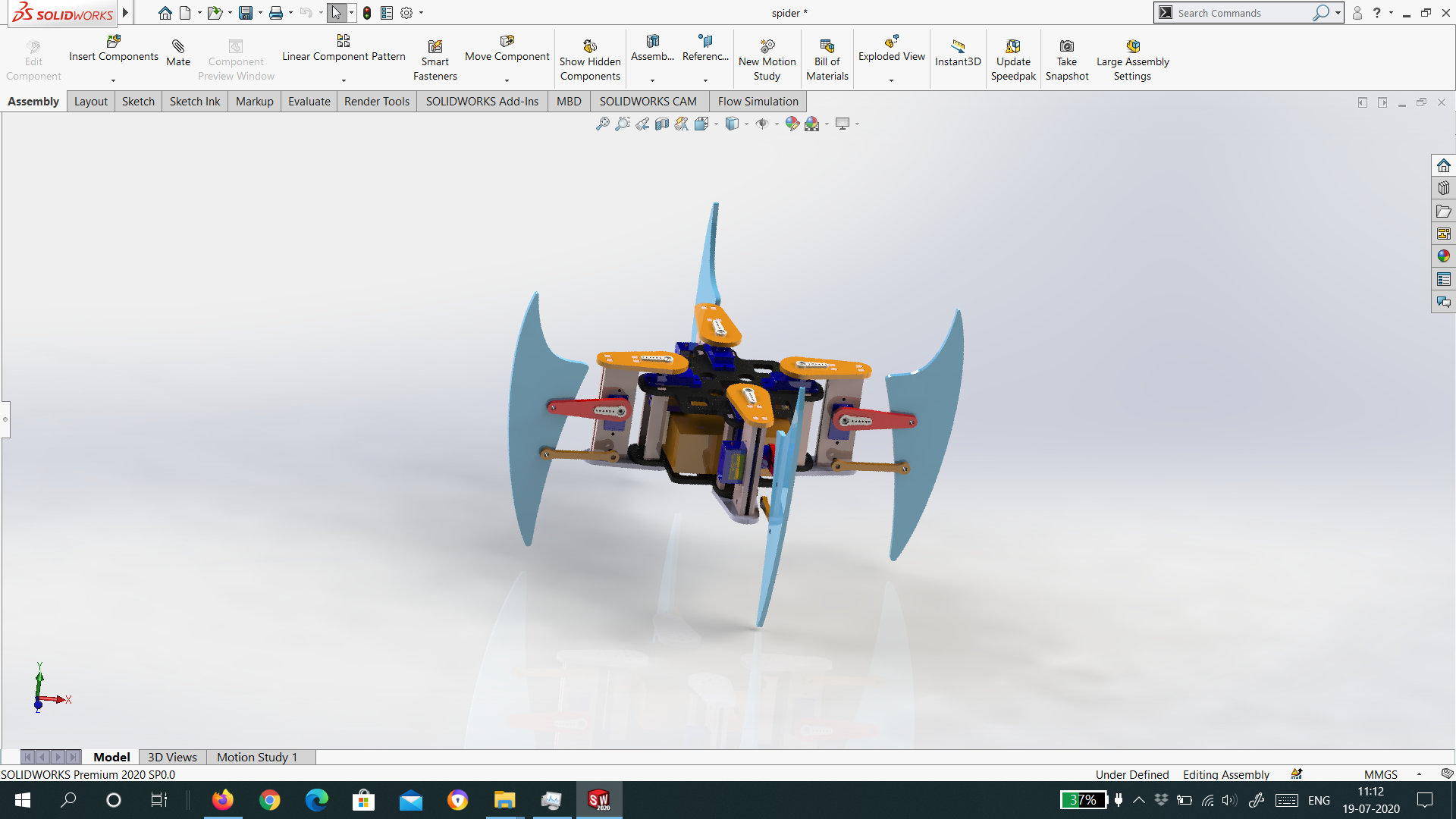
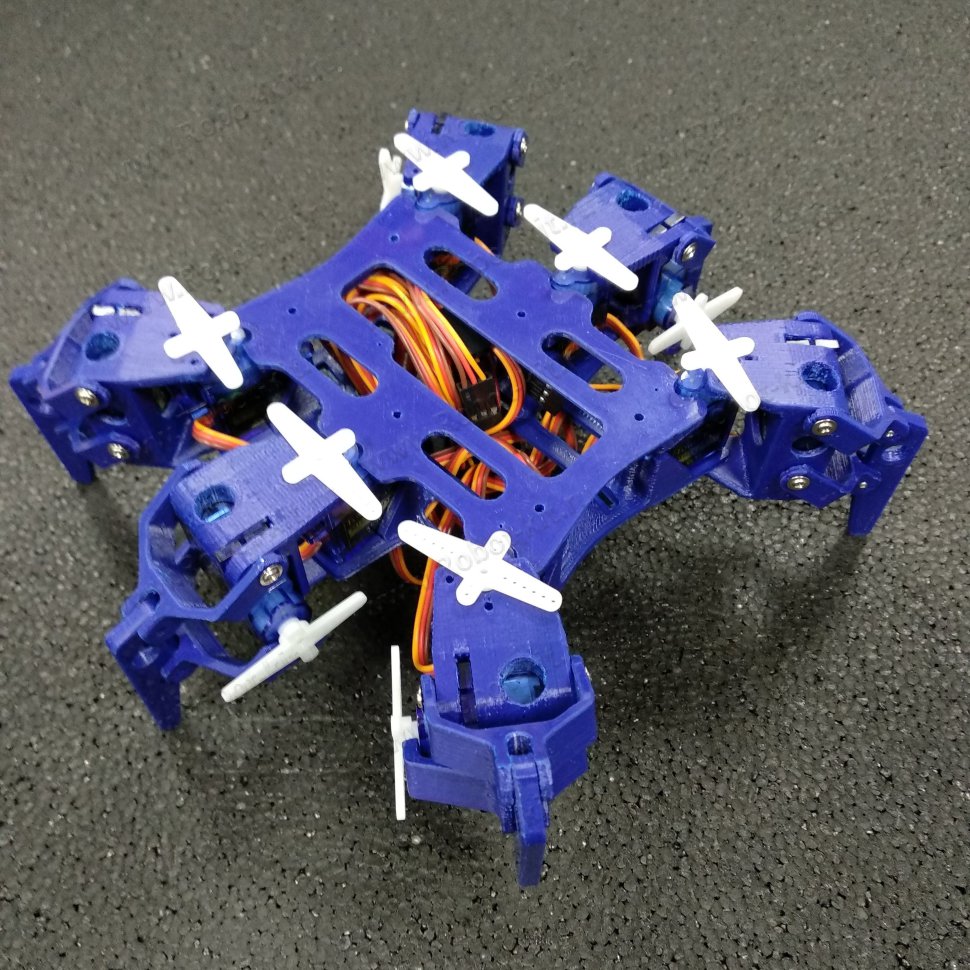
Инструкция по сборке и программированию робота — паука Quadruped на Arduino. Этот робот умеет перемещаться на 4 «ногах»: двигаться вперед, назад, влево , вправо, по диагонали. Управлять им будем с помощью ИК пульта и ИК датчика. К роботу можно присоединить датчик дальности или датчики линии для решения робототехнических задач, участия в соревнованиях. Корпус робота вырезаем на лазерном гравере из фанеры 3мм.






Телефон или почта. Собери собственного робота! Открываем двери будущего вместе! Наш сайт: vk. Закрыто Откроется в понедельник.