
СОЗДАНИЕ МОБИЛЬНОГО РОБОТА-МАНИПУЛЯТОРА "ЭВЕРЕСТ" НА ПЛАТФОРМЕ ARDUINO
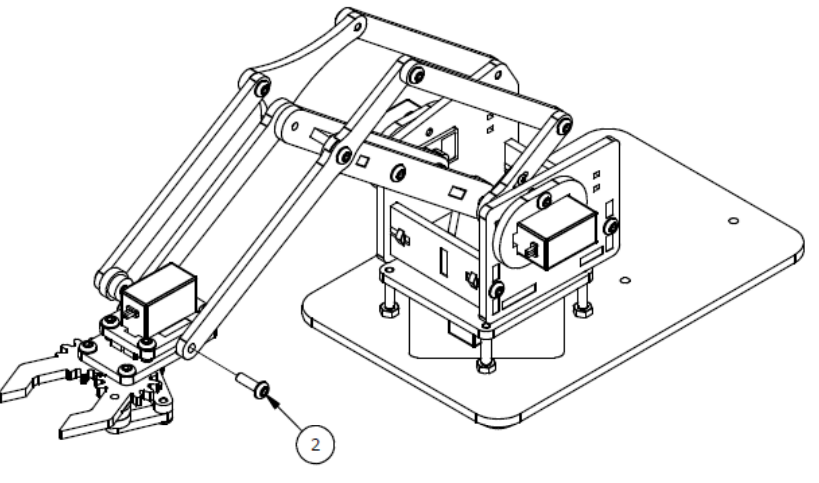
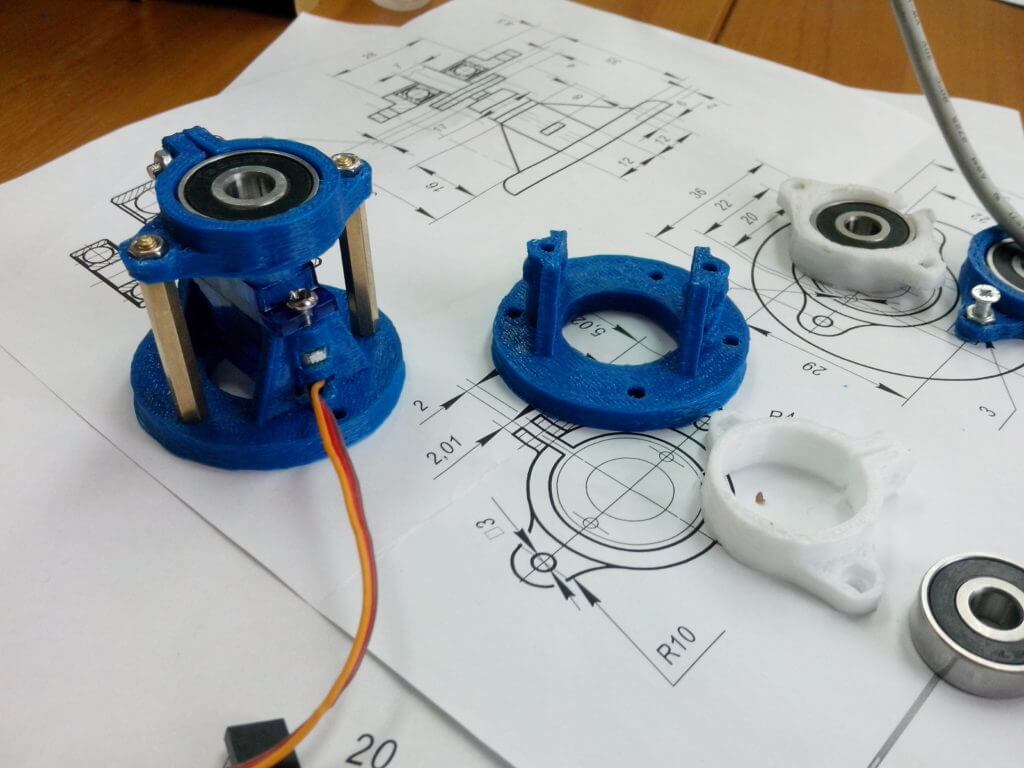
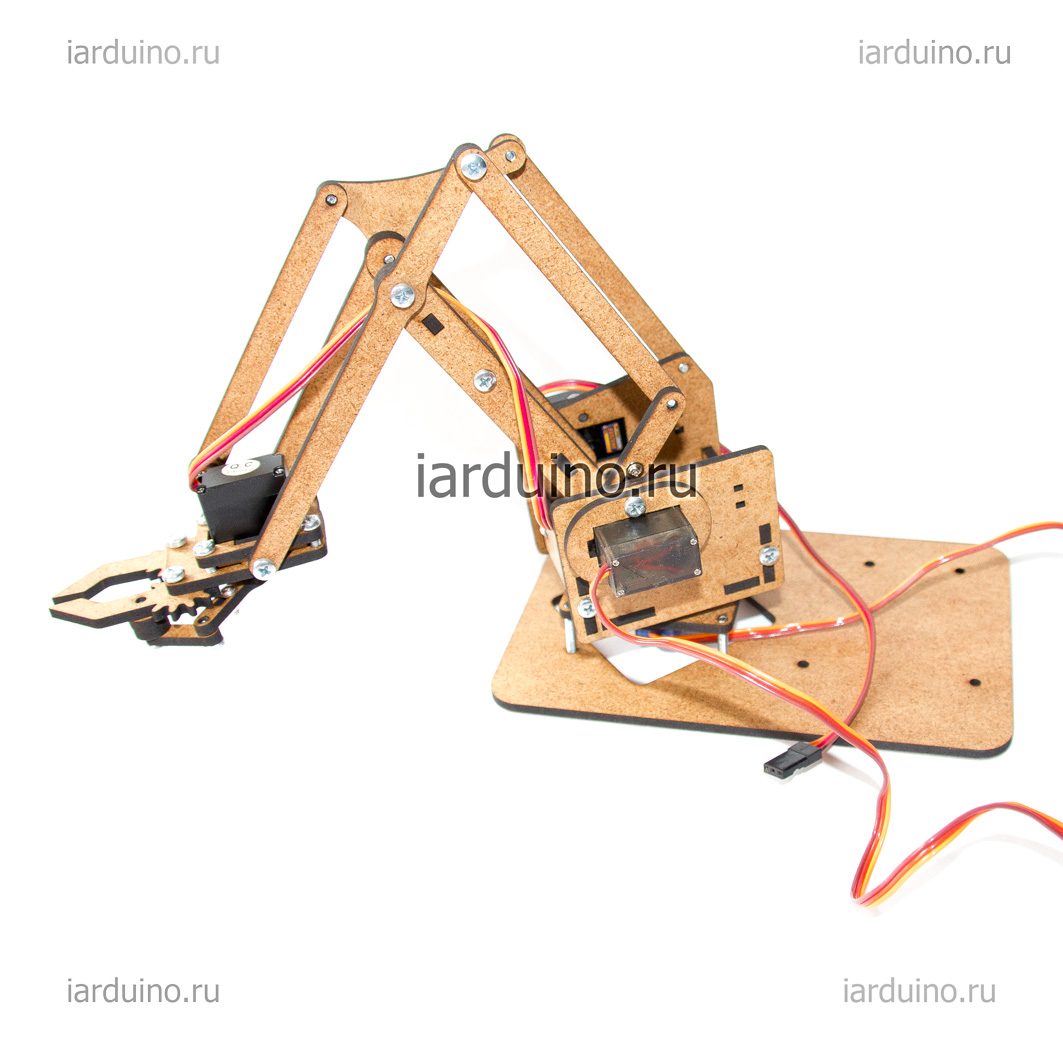
Роботизированные манипуляторы в течение десятилетий использовались на сборочных линиях, производящих все, от автомобилей до электронных плат. Они также являются очень популярными проектами для экспериментаторов робототехники. Данный набор включает в себя сервоприводы, кронштейны, крепеж, подшипники и механизм захвата, с помощью которого можно собрать небольшой мощный роботизированный манипулятор. Кронштейны и опоры для кронштейна изготовлены из черного анодированного алюминия, что обеспечивает прочную опору. Манипулятор оснащен пятью сервоприводами стандартного типоразмера:.










Растущая потребность в снижении эксплуатационных расходов на предприятиях является основной движущей силой мирового рынка робототехники. Снижение расходов может быть достигнуто за счет уменьшения ошибок в производственном процессе, потерь сырья и количества несчастных случаев, повышения технологической гибкости и производительности предприятия, улучшения условий труда и степени безопасности сотрудников. И в этом всем помогают роботы, которые используются в большинстве отраслей промышленности из-за их способности с высокой точностью выполнять сложные повторяющиеся задачи даже в опасных условиях, в частности — роботы-манипуляторы. Робот-манипулятор - это механизм, состоящий из кинематической части, то есть механической руки и системы электроуправления. Современные роботы являются электромеханическими устройствами, то есть в их конструкции, отсутствует пневматика или гидравлика, предназначенная для выполнения движений, что существенно упрощает и удешевляет эксплуатации роботов, одновременно повышая их надежность.
- RU доступ к данной странице для анонимных пользователей с IP-адреса
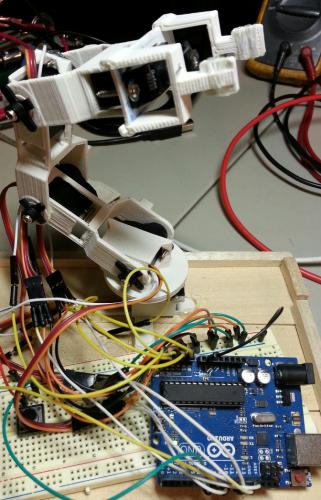
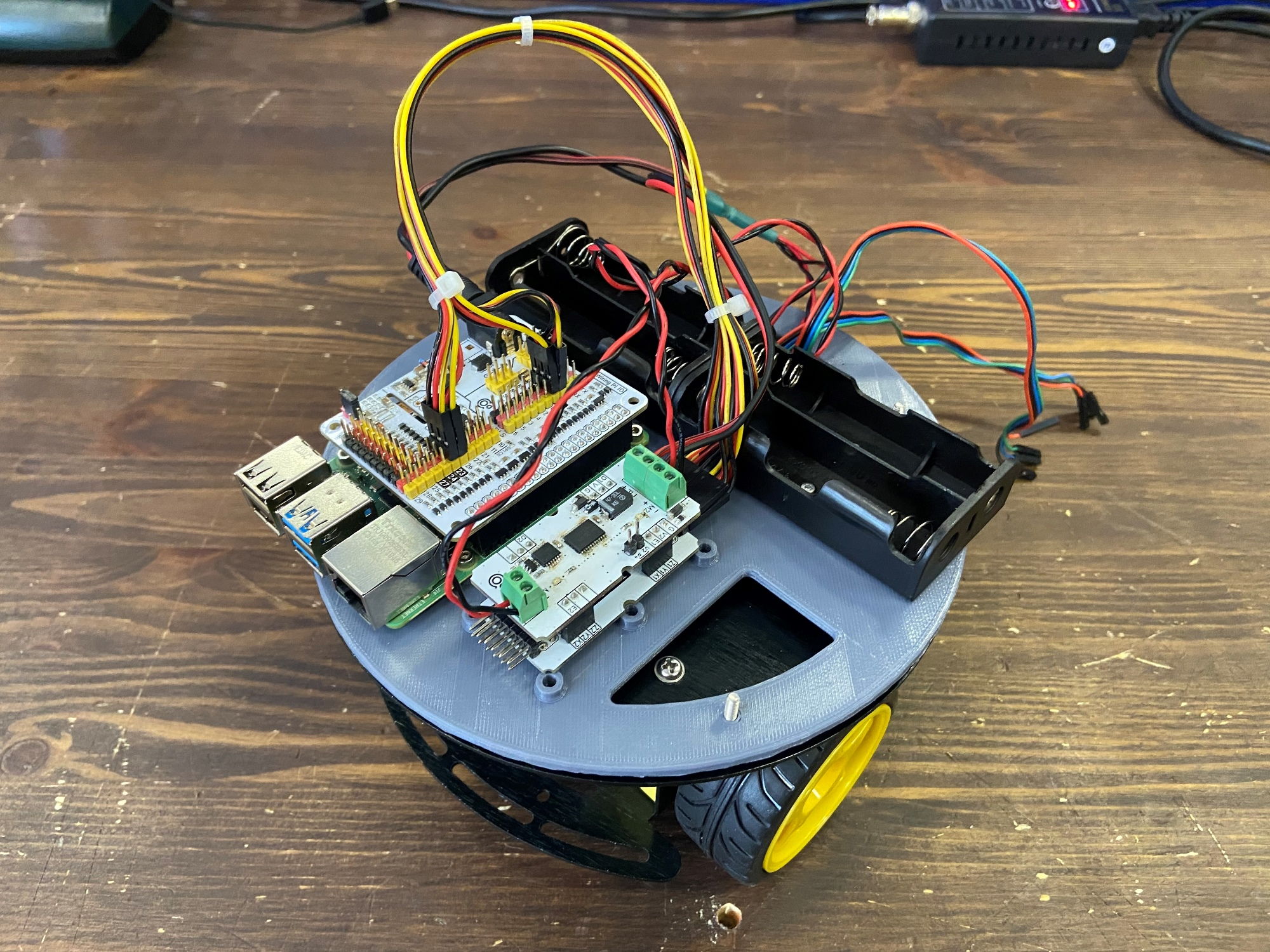
- Часть 1. Немного про мозги системы.
- Мы уважаем вашу конфиденциальность, введенная в форму информация не будет передаваться третьим лицам.
- Software Developer. Поиск Написать публикацию.
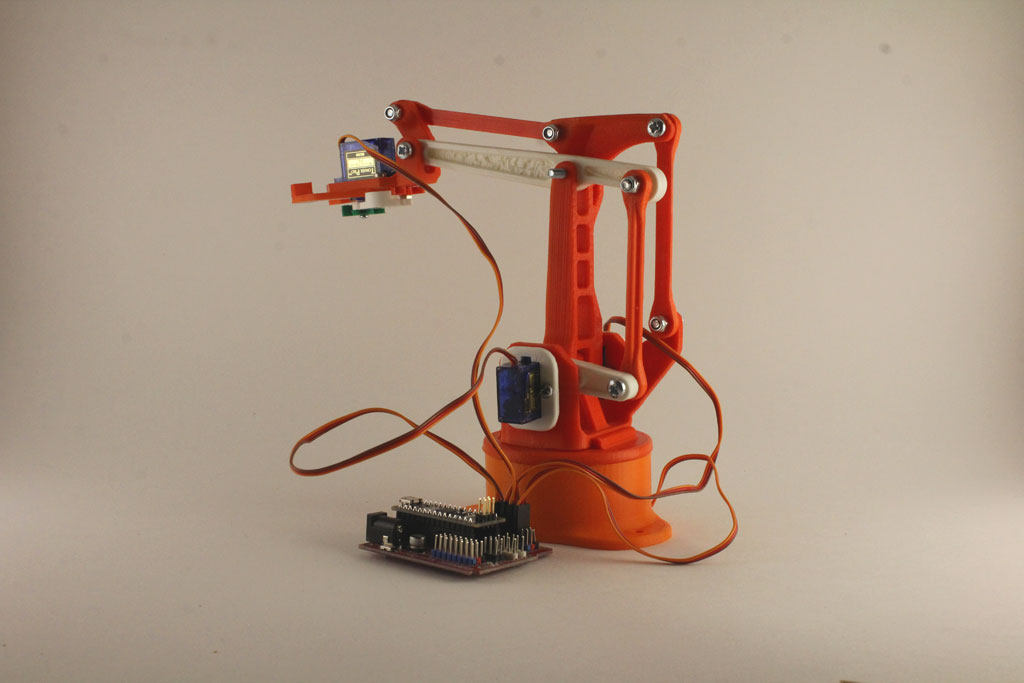
- Привет мои юные инженеры! Эта история о том, как, не имея никаких знаний в робототехнике, схемотехнике и прочего, удалось собрать рабочую модель робо манипулятора и осуществить детскую мечту.
- В этой статье мы на подробном примере расскажем о том, как построить настоящего робота целиком на инфракструктуре ROS — Robot Operating System.








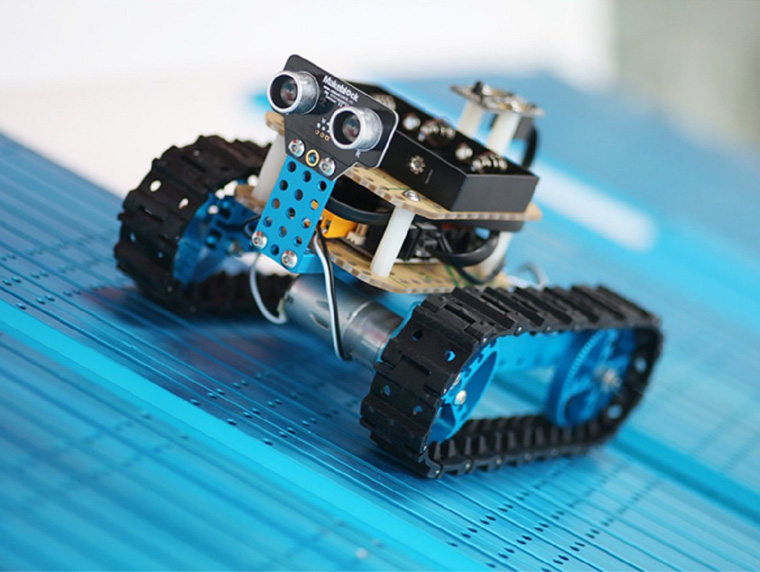
Полезные статьи. Какой конструктор программируемых роботов выбрать? Добавить в сравнение.








Похожие статьи
- Видео как сделать сердце своими руками - Клилк лучшее приложение для создания мультиков
- Выкройки платья с круглой кокеткой - Рассмотрим пошаговый процесс построения выкройки платья с кругл
- Почему сильно загружен процессор
- Как строят дома своими руками из пеноблока - Высокие клумбы своими рукам: правила создания и фото цв